
Tutorial #25 – Scanner 3D Arduino Kinect
Per vedere tutti i tutorial: www.marcopucci.it/arduino/

Segui la pagina Tutorial Arduino su Facebook
Materiale utilizzato – Arduino UNO – Motor Shield (2A Motor Shield) – 2 motoriduttori – 2 ruote – 2 ruote a sfera – struttura robot – Kinect – tubo di plastica
N.B.: Clicca qui per scaricare il file .zip con tutti gli sketch utilizzati per realizzare lo scanner 3D.
Questo tutorial è stato realizzato in collaborazione con www.robotics-3d.com che mi ha fornito i componenti per costruire lo scanner 3D.
Se volete acquistare il kit per realizzare il tutorial “Scanner 3D” cliccate qui.
N.B: La kinect e il tubo non sono compresi nel kit Potete acquistare la kinect 2 sul sito ufficiale di Microsoft o trovare delle kinect 2 usate o in offerta su Ebay.
Attraverso la Kinect, una telecamera ad infrarossi che rileva la profondità, è possibile effettuare delle scansioni 3D di oggetti o persone. Grazie al programma 3D Builder di Windows 10 (per utenti Mac dovete cercare il software analogo) possiamo effettuare questa registrazione muovendo lentamente la Kinect intorno al soggetto. Inserendo la Kinect sopra un piccolo robot la scansione avviene in maniera ottimale. Il robot che andiamo a realizzare ha due piccole ruote a sfera che lo aiutano a seguire un tubo flessibile posizionato a forma di cerchio che circonda l’oggetto da scansire.
[slideshow_deploy id=’3803′]
La struttura
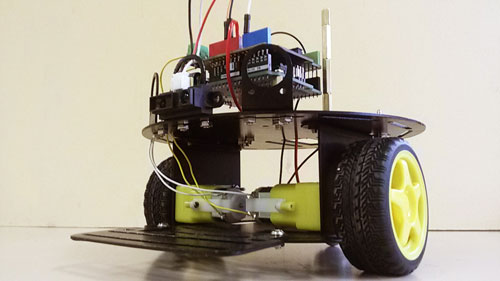
Potete utilizzare qualsiasi tipo di struttura come base per il vostro scanner robotico. In questo tutorial ho utilizzato la piattaforma robotica 2WD acquistabile sul sito www.robotics-3d.com. Questa base è un ottima soluzione per realizzare piccoli robot se non siamo in grado di costruircela da soli. Inoltre al suo interno sono già presenti due motorini e due ruote facilmente assemblabili. L’unica modifica da apportare è incollare le due ruote a sfera nella parte anteriore del robot.

Schema elettrico
Qui sotto lo schema elettrico del circuito che dobbiamo realizzare.
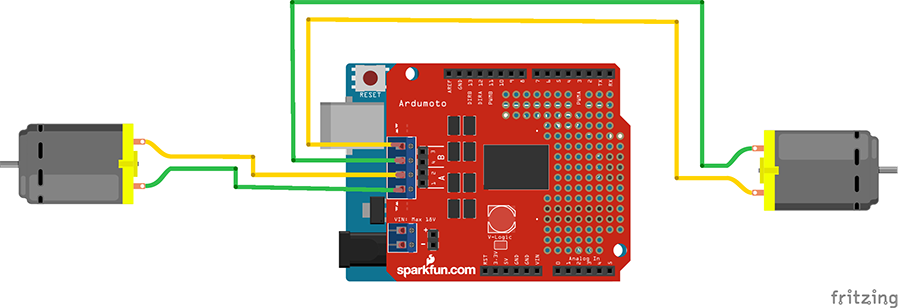
1 – Inseriamo la Motor Shield sopra il nostro Arduino (più avanti la spiegazione di questo componente).
2 – Collegate i due motorini alla Motor Shield seguendo lo schema elettrico.
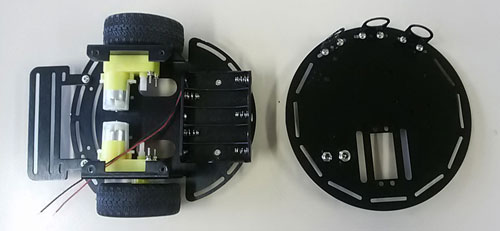
Alcuni dettagli della struttura del robot.
Motor Shield
La Motor Shield è un componente utilizzato per gestire due motorini. Il suo funzionamento è elementare: ciascun motore è collegato con due cavi a questa. Il primo cavo gestisce la direzione (avanti o dietro), il secondo la sua velocità.
Apriamo il file _1_motorini.ino (se non avete scaricato la cartella con tutti gli sketch cliccate qui). Uplodate lo sketch e vedrete il robottino muoversi in avanti. Qui sotto l’analisi del codice.
int E1 = 5;
int M1 = 4;
int E2 = 6;
int M2 = 7;
//Dichiaro 4 pin: E1 e E2 sono la velocità dei due motorini. M1 e M2 gestiscono la loro direzione
void setup()
{
pinMode(M1, OUTPUT);
pinMode(M2, OUTPUT);
}
void loop()
{
digitalWrite(M1,HIGH);
digitalWrite(M2,HIGH);
analogWrite(E1,180);
analogWrite(E2,180);
}
I pin delle direzioni vengono impostati su HIGH così la direzione è avanti. La velocità dei due motorini è 180, non troppo veloce per for far muovere troppo la kinect (per variare la velocità possiamo inserire un valore compreso tra 0 e 255).
Scansione 3D
Dopo aver installato la kinect 2 e averla fissata sopra il nostro robot siamo pronti per effettuare la prima scansione. Apriamo il programma 3D builder (presente su Windows 10). Se avete una versione precedente di Windows oppure siete utenti Mac cercate un software analogo.
 |
Colleghiamo la Kinect 2 al pc e clicchiamo su SCANSIONE. |
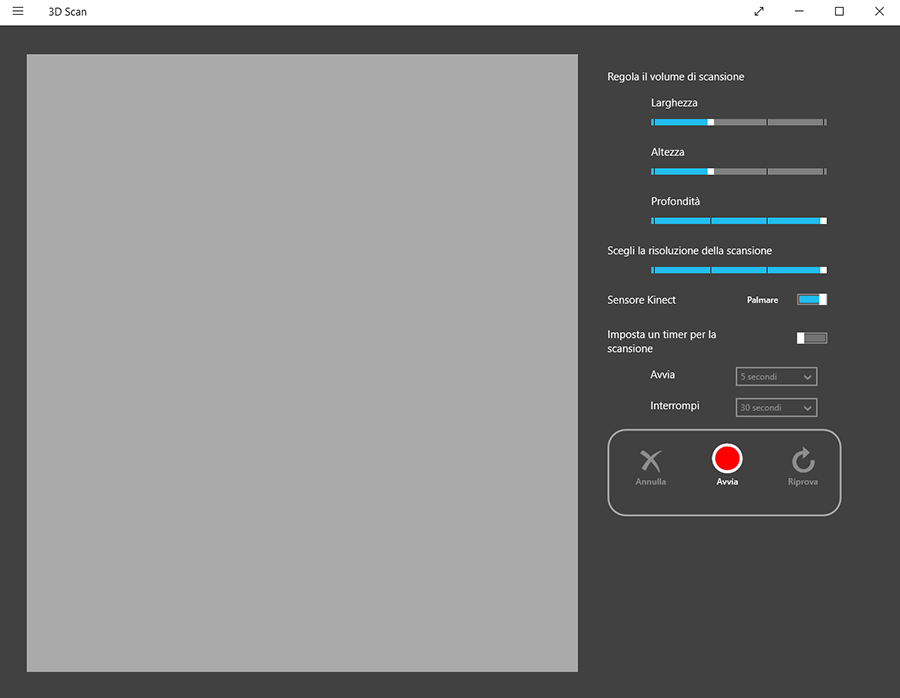 |
In questa finestra possiamo regolare la qualità della scansione, l’altezza, larghezza e profondità. Cliccando su Avvia la kinect si accende e inizia la scansione. |
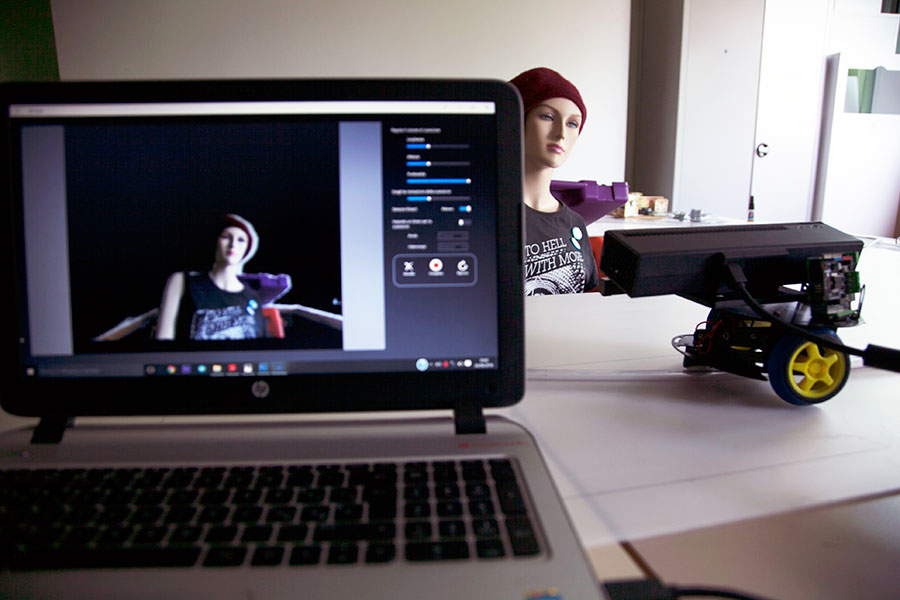
Colleghiamo il robot al computer (con la presa USB) per alimentarlo. Il robot e la kinect inizieranno a girare intorno al soggetto da scansire.
Questa operazione deve essere effettuata in almeno due persone perchè mentre il robot gira bisogna seguirlo tenendo il computer e i cavi di
alimentazione della kinect.
Terminato il giro clicchiamo su COMPLETA.
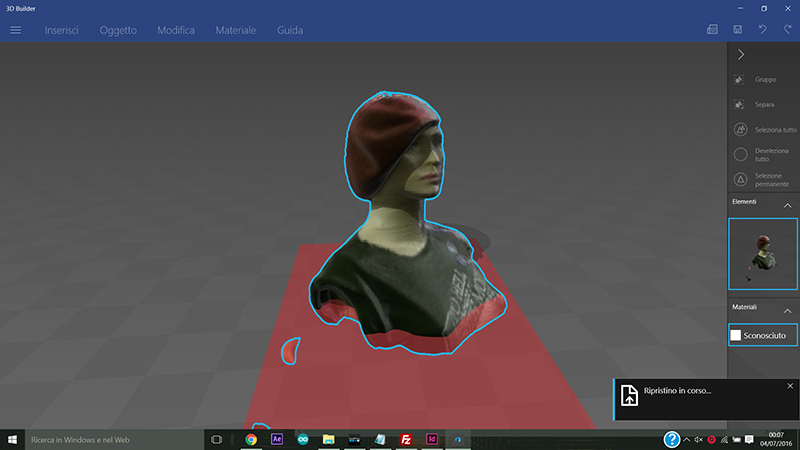
In alto il modello 3D realizzato.
Clicchiamo su Salva con nome ed esportiamo il file nel formato .stl o .obj per stamparlo con una stampante
3D oppure utilizzarlo con altri programmazione di animazione 3D.
Il tutorial prosegue con la stampa del modello 3D. Esistono moltissimi tipologie di stampanti ed ognuna utilizza il proprio software. Nel mio caso useremo una stampante CRAFTBOT PLUS e il suo software CraftWare. Consiglio l’acquisto di questa stampante per il suo ottimo rapporto qualità/prezzo.
La stampane può essere acquistata in questo link.
Stampa 3D
Apriamo il software CraftWare e importiamo il file manichino.stl.
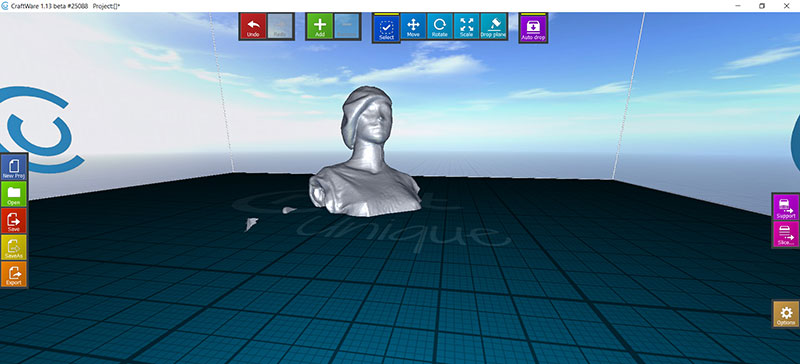
Click su Slice per impostare la stampa. Inseriamo ULTRA in Print Quality e selezioniamo PLA come materiale plastico.
Finito!
Click su PRINT, aspettiamo tre, quattro ore e il nostro modello è stampato.
![]()
I tutorial sono liberamente scaricabili e condivisibili sotto l’etichetta Creative Commons (non è possibile commercializzarli e modificarli)
 |
Scarica il Pdf del tutorial “Scanner 3D” |
Ti è piaciuto il tutorial? Se ti va offrimi un caffè… [paypal-donation] |